5s
+1
Submission successful!




Kühlmethode: Luftkühlung
Klassifizierung der Abschlüsse: IP54
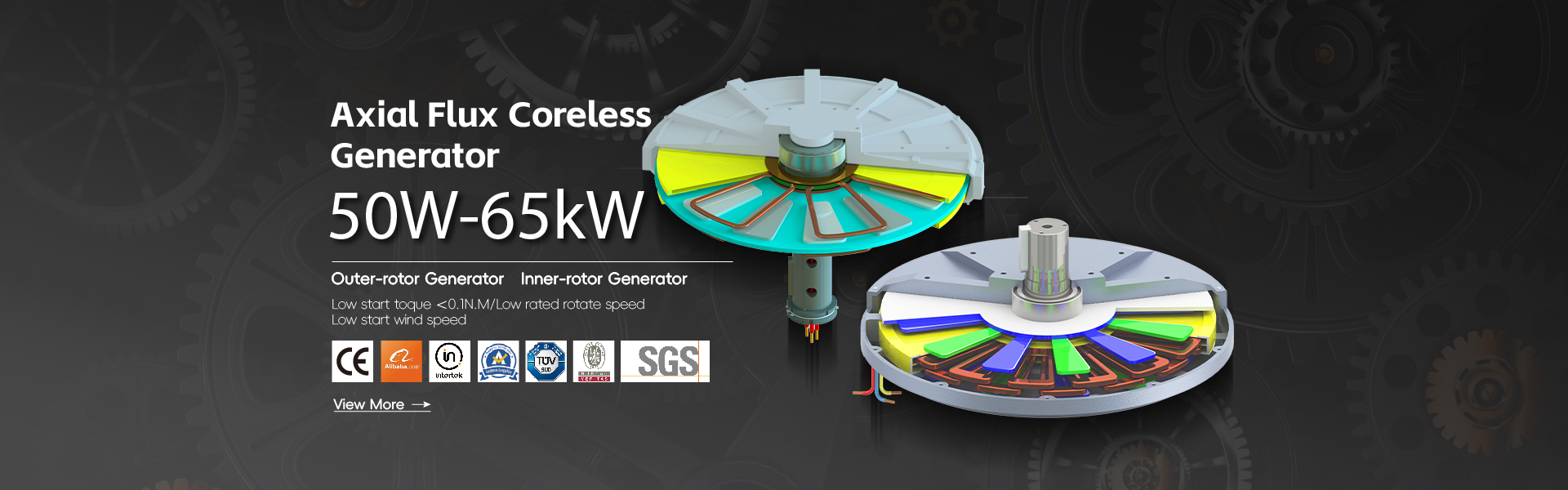
Nennleistung: 10 kW
Blatt-Material: Aluminiumlegierung
Typ: Wind-Stromgenerator
Nennleistung: 300w-30kw
Anfangsdrehmoment: < 0,3 N.M.
Bewertete Arbeitsspannung: Dies ist der Fall, wenn die Leistung des Geräts nicht überschritten wird.
Bewertete Windgeschwindigkeit: 11.5 M/s
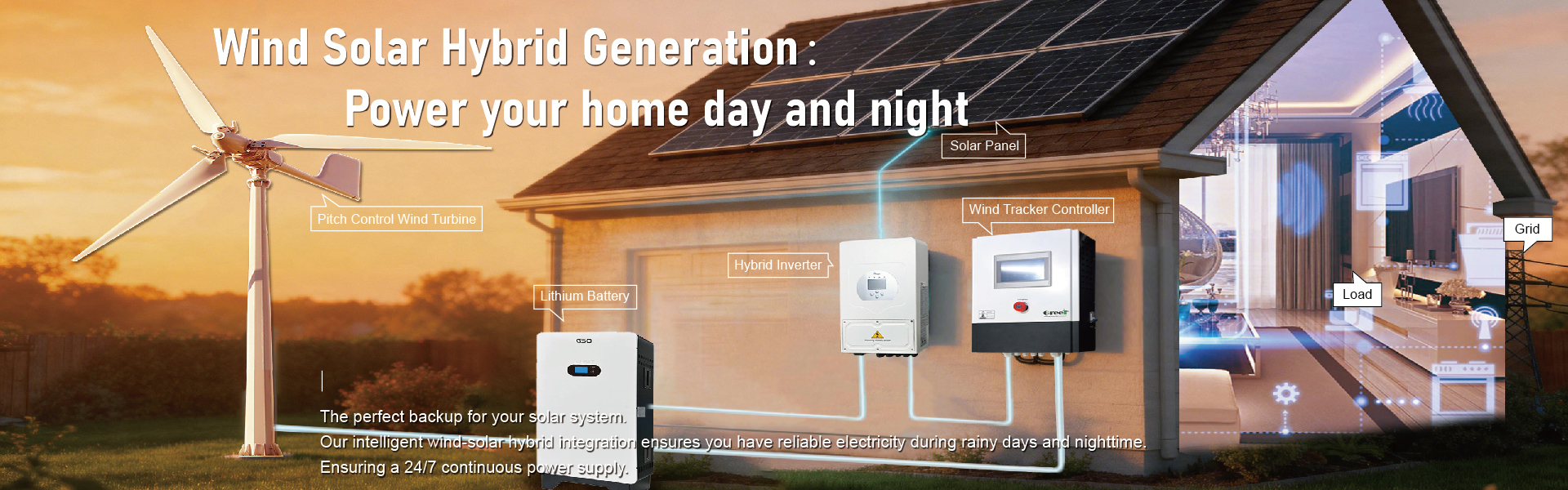
Produktname: Hybridkonverter
Nennleistung (KW): 100 kW/150 kW/200 kW/250 kW/300 kW/500 kW/600 kW/700 kW/800 kW/1000 kW
Ausgangsfrequenz: 50 Hz / 60 Hz


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


